Masters Degree in Guidance and Navigational Contro...More
Sections
Global positioning system (GPS) is a satellite based navigation system that consists of a network of 24 satellites. Each of these satellites are 11000 nautical mile in space and are placed in six different orbits. The satellites are constantly moving and make 2 complete orbits around earth in one day or 24hours. Their speed is around 2.6 Km per second.

Figure1: Typical GPS Satellite System
The first GPS satellite was launched by US Air Force in February 1978. Each satellite is about 5m long if the solar panels are extended and weighs about 1 tonne. The transmitter power is just 50W or less. The life expectancy of each satellite is 10years and replacements are built and launched into orbit continuously. The satellite orbits is around 25000Km from the earth’s centre and approximately 20000km. The high altitude ensures that the satellite is predictable, precise and stable and also the satellite motion is not affected by the atmospheric drag. Each plane is inclined at 55 degree to equator. The advantage of GPS over land based navigation system is that it will work in all weather conditions. The GPS satellites are powered primarily by solar energy tapped using solar panels. These satellites continuously broadcast its position and time information via two frequencies namely ‘L1’ and ‘L2’. Civilian GPS uses ‘L1’ frequency of 1575.42MHz and provides Standard Positioning Service (SPS). Using SPS one can get 15m horizontal accuracy at 95% times. The civilian GPS contains a Coarse Acquisition Code (C/A Code) and Precise Code (P Code). The P Code used for Precise Positioning service (PPS) is only available for military. Using the P Codes from both frequencies the military receiver can achieve better precision than civilian receivers.
The calculation of position of a GPS receiver is done using a technique called Satellite ranging. The position of GPS satellite is calculated by measuring its distance from a group of satellites. The calculation is done by measuring the time taken by a radio signal to reach the GPS receiver from a particular satellite. The radio signal travels at the speed of light (3X108 m/s), so the distance can be calculated by the formula.
Distance = Velocity x Time

Figure2: Calculation of Distance in GPS using Time Difference
GPS satellite ranging allows a receiver to determine its 3 dimensional position; latitude, longitude and height. Since the measurement of time is the basis for the distance calculation, both the time of the transmitter and receiver must be coordinated. The GPS receiver measures range to 4 satellites to determine latitude, longitude and height and its time correction. Once the GPS receiver has the distance measurement from the four GPS satellites then by trilateration the position is found. The following example illustrates how the position of a GPS receiver is calculated.
The GPS receiver locks-on to a satellite calculate its range to be 12000miles. This will narrow down the receiver’s location, but it only tells that the location somewhere on a sphere with the satellite as centre and radius 12000miles. But most of the locations of the sphere are out in space and only a small portion on the earth.
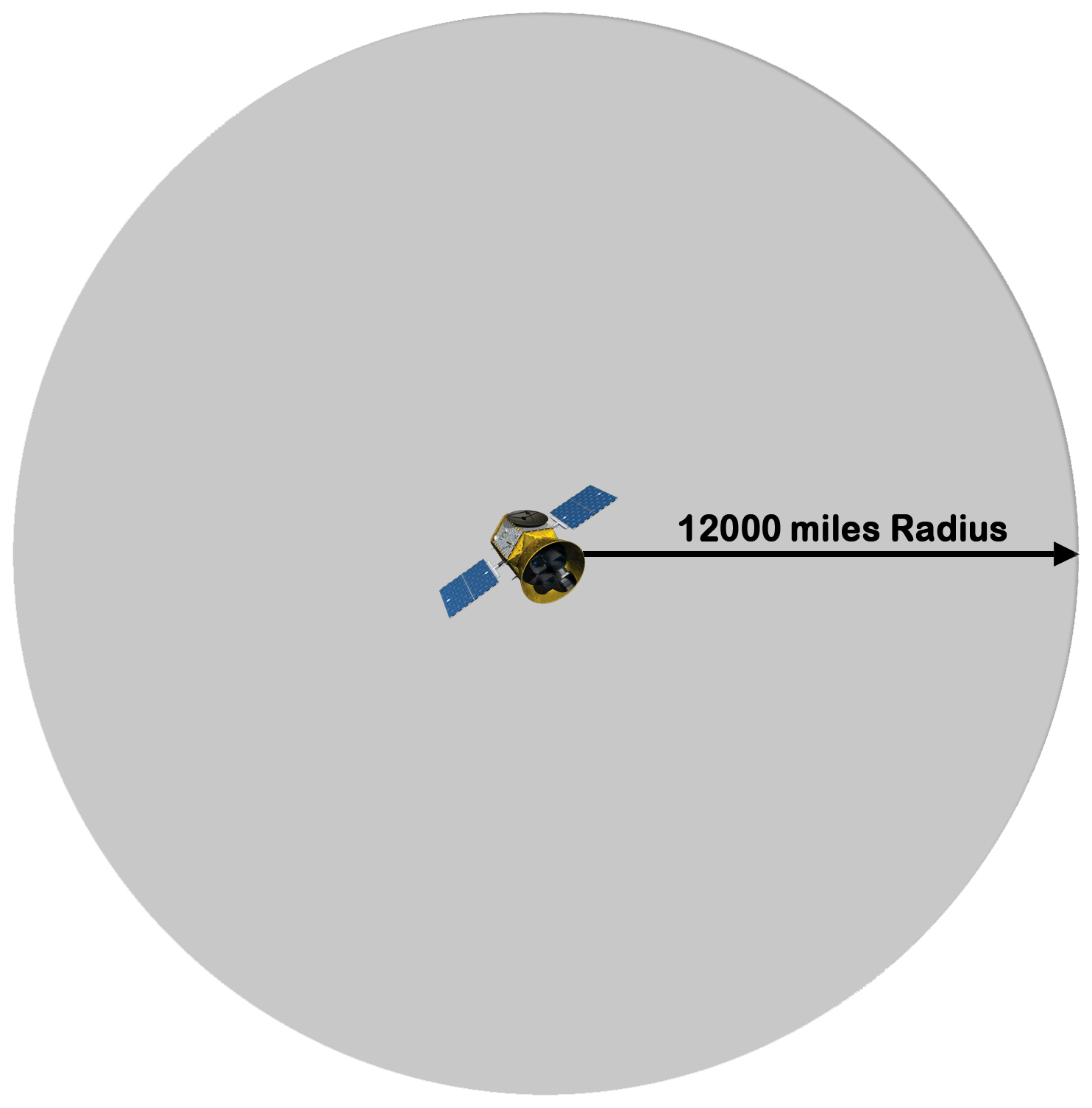
Figure3: Signal from a satellite at a distance of 12000 miles
Now the receiver picks up signals from a second satellite and the range between the receiver and satellite is calculated to be 11000miles. The location of the receiver must be somewhere on a sphere with the second satellite as centre and radius 11000miles. So the location of the receiver must be somewhere these two spheres intersect. To be precise the location of the receiver must be somewhere on the circle formed by the intersection of the two spheres.
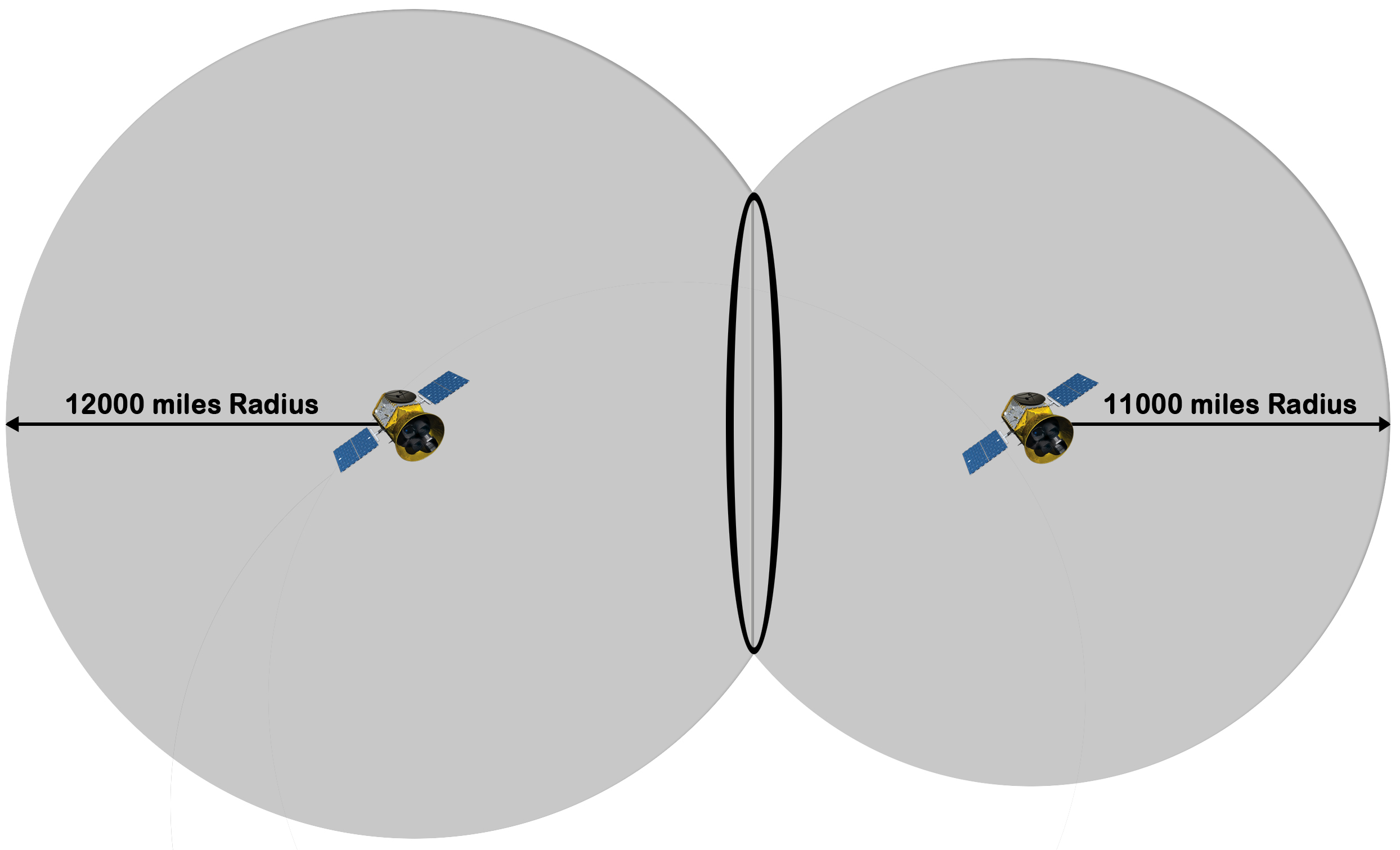
Figure4: Signals from two satellites at a distance of 12000 miles and 11000 miles
The receiver picks up signals from a third satellite and the range was measured to be 11500 miles. Now the location of the receiver must be somewhere in the intersection of the first two spheres and the sphere formed with third satellite as centre and 11500miles as diameter. Only two such points can occur, but usually one of the two points is discarded as one of them is nowhere near the earth. So the remaining point must be the location of the GPS receiver.
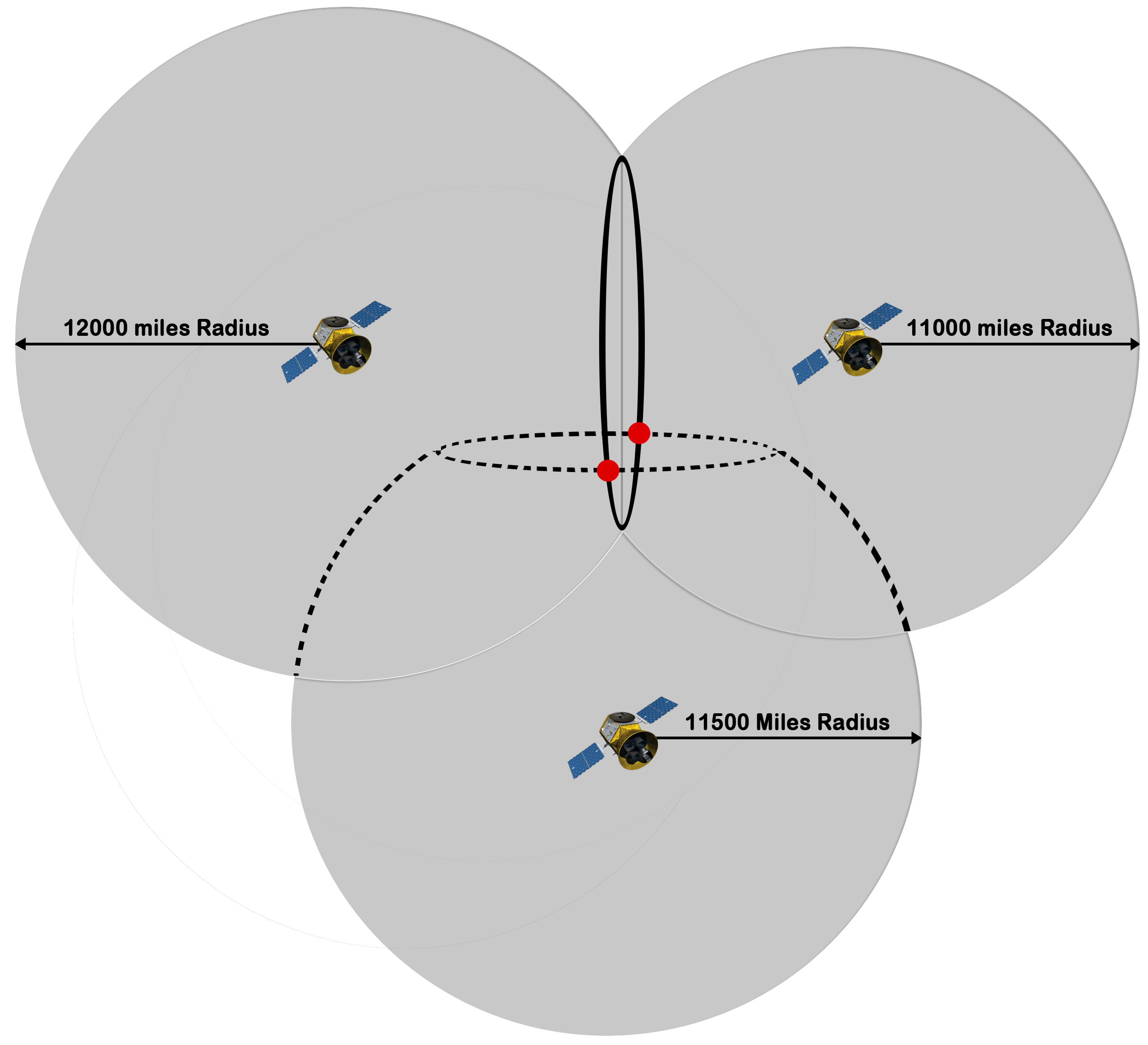
Figure5: Signals from three satellites at a distance of 12000 miles, 11000 miles and 11500 miles
Usually the fourth satellite measurement is needed for correcting clock error.

Figure6: Signal received from 4 different satellites
There are many probable errors which reduces the accuracy of the location computed by the GPS receiver.
When the GPS satellite signals may get refracted during its path through ionosphere and troposphere which may alter the travel time of the signals from the speed of signal in space.
Errors can occur due to distortion of signal or measurement noise which may result from electrical interference or errors inherited in the GPS receiver.
Sun spot activities cause interference with the GPS signals.
Error in the information about the satellite orbit causes error in the calculated position. It is because the position of the satellite weren’t in the position information received by the GPS receiver.
Small variation in the atomic clock on board the satellite can cause large position errors. A variation of 1 nanosecond can cause a position error of about 0.3m on the ground.
Error due to multipath occurs when the signals transmitted by the satellites bounce off a reflected surface before reaching the receiver antenna. So the receiver gets a signal in the straight line path as well as a delayed path. The effect is similar to a double image in TV sets.
Geometric Dilution Precision
The satellite geometry can also affect the accuracy of GPS positioning. This effect is called Geometric Dilution Precision (GDOP). Geometric Dilution Precision refers to where the satellites are in relation to one another. It is also the measure of quality of satellite configuration. It can either magnify or lessen the errors. Wider the angle between the satellites better is the measurement. GPS receiver usually reports the satellite geometry in terms of Position Dilution Precision or PDOP. Position Dilution Precision refers to horizontal (HDOP) and vertical (VDOP) measurements. The quality of satellite configuration currently used by the receiver can be found out by checking the PDOP value in the receiver. A lower DOP value indicates higher probability of accuracy and a high DOP value indicates lower probability of accuracy. A DOP of 5 or less in excellent, a DOP value between 5 and 8 is acceptable and DOP value 9 or above is poor. Another common term is the Time Dilution Precision and it refers to satellite clock offset. A PDOP mask can be set in the GPS receiver which ignores any DOP value beyond the set limit.
The level of accuracy depends on the type of receiver used.
Differential Correction: this method is used to reduce the effect of atmospheric error and other source of positioning error. But differential correction method cannot correct multipath error or receiver error as it can only correct errors that are common to both reference and roving receiver. In addition to the roving receiver it requires a GPS receiver on the ground in a known location to act as a static reference point. This type of arrangement is known as GPS base station. Since the base station known where it is, it can compute the errors in its position calculation.
Global Orbiting Navigation Satellite System is the navigation system developed by Russian Government similar to GPS. The first GLONASS satellite was launched in October 1982. The full constellation consists of 24 satellites in 3 orbit planes. It was a 64.8 degree inclination to equator. GLONASS uses same code for each satellite and many frequencies whereas GPS uses different codes for each satellite and 2 frequencies. Some GPS manufacturers have incorporated the capability to receive both GPS as well as GLONASS signals. This increases the availability of satellites and integrity of combined system.
Galileo is the navigation system contributed by Europe to the next generation Global Navigation Satellite System (GNSS). The GPS system in funded by public sector and operated by United States Air Force, whereas Galileo will be civil controlled and funded by both public as well as private sector. The service will be free of cost at the point of use but a range of chargeable service with addition features will be offered. These additional features include improved reception, accuracy and availability.
The first Galileo test satellite, GIOVE-A was launched on 28 December 2005 and the first satellite in the operational system was launched on 21 October 2011. Galileo has two ground stations, one located at Germany and other at Italy. Until 2015 the system has 12 out of 30 satellites in orbit. It will start its early operational capabilities from 2016 and reach fully operational activities on 2019. All 30 satellites which include 24 operational satellites and 6 active spares is expected in 2020.
Indian Regional Navigation Satellite system is a navigation satellite system used to provide real time positioning and timing service over the region of India and region extended to 1500Km around India. The fully developed IRNSS system consists of 3 satellites in GEO orbit and 4 satellites in GSO orbit. These satellites are placed at an altitude of 3600Km above the surface of the earth. The full system consists of 9 satellites with two on the ground station as stand by. The first satellite in the IRNSS constellation, IRNSS-1A was launched on 1 July 2013. 5 satellites are already placed in orbit and the constellation of 7 satellites is expected to operate from June 2016. The IRNSS will provide two types of services, Standard Positioning Service open for civilian use and Restricted Service for authorized users including Indian Military.

Figure7: IRNSS Coverage





Sections





Copyright © 2024 Mepits - Designed By Digiora

