Sections
Robot is nothing but a system which contains power supplies, manipulators, control systems, sensor modules and software’s; all these systems are working together in a mechanical system or it is a system that does works automatically without any other physical help. The word Robot is derived from “Robota” which means “Forced Labour”; the actual meaning of the word is the capability of a machine to carry a difficult task or action automatically. Engineers and Inventors invented self-operating systems, some resembling human and animals. This is a type of automation which is originating from various mythologies of our world.
The branch of mechanical engineering, electrical engineering and computer science and engineering which deals with design, construction, application and operation of the robot is known as Robotics. Today Robotics is one of the fastest growing fields. The computer system is the central control of any type of robot; it controls the sensory feedback and information processing. In any way engineer still hasn’t been able to build a robot with ‘100 % Common sense' to interact with live world. All control of the robot according to the program is installed earlier in the machine. Research for developing this type of robot is going on at the MIT Artificial Intelligence Lab. Modern Robots is usually computer controlled electro-mechanical systems or electronic controlled systems.
An important characteristic of a real robot is its potential of interaction with other physical movements. These movements are provided by the electronic circuits and programs which help them to do a particular task or an action. And the second most important characteristic is that the ability to identify and understand the data of a physical object. Today, robots are replaced by humans in the assistance of risk and dangerous tasks in various fields. Some of the important characteristics are pointed below,
Movement: A robot should have the capability to move around its surroundings. This is done by using wheels or any other equipment like Canadarm etc. Canadarm is nothing but a Shuttle Remote Manipulating System; it’s a series of robotic arms used on the space shuttle orbiters.
Sensing: First of all a robot should have the ability to sense their surroundings and give feedback to the system. And it must sense in the similar way as like the human does. Sensors have the ability to increase the performance of a robot in a wide area. Visual sensors make robots more intelligent and help them to make sudden reactions. Major types of sensors that have been used in robotics are light sensor for eye, touch and pressure sensor for hand, sonar sensor for ear, taste sensor in tongue and force sensor for identifying different types of forces of several functions.
Power Source: There are three types of power source that are used in the robots. The robots may be solar powered or may be electrically powered or may be battery powered. The selection of power sources is accordance with the function of the robot.
Intelligence: This is nothing but the overall performance of the Robot. Here we can see the influence of the program. Programs control all the functions of the robot. After receiving the program it knows about what to do and how it does.
 In 1985 first surgery was done by the robot. After that its use was discontinued due to some safety issues. In present robots make an impact in every medical field like Neurosurgery, Laparoscopy, orthopedic surgery and other important fields. In 1988 a robot called PROBOT done world’s first autonomous surgical procedure. DA Vinci Xi is one of the most latest surgical robotic devices developed by Intuitive surgical Inc. It offers a great range of motion. Nano robotic in medical applications is one of the helpful inventions in the medical field. Medical nano robots have the capability of actuations, signaling, sensing, information processing and many other functions. Nano robotics is good for tumor treatment. Arteriosclerosis is done by nano robots, that is; the fatty deposits on the wall of the arteries are removed by this robot and they make the arteries more flexible and improves the blood flow rate through the arteries.
In 1985 first surgery was done by the robot. After that its use was discontinued due to some safety issues. In present robots make an impact in every medical field like Neurosurgery, Laparoscopy, orthopedic surgery and other important fields. In 1988 a robot called PROBOT done world’s first autonomous surgical procedure. DA Vinci Xi is one of the most latest surgical robotic devices developed by Intuitive surgical Inc. It offers a great range of motion. Nano robotic in medical applications is one of the helpful inventions in the medical field. Medical nano robots have the capability of actuations, signaling, sensing, information processing and many other functions. Nano robotics is good for tumor treatment. Arteriosclerosis is done by nano robots, that is; the fatty deposits on the wall of the arteries are removed by this robot and they make the arteries more flexible and improves the blood flow rate through the arteries.
Since the implantations of the automotive robots were implemented there are lots of things that have been changed. In 2013, Ford Company decides to implement a robotic arm with eye during the production of Ford Escape. A laser and a camera that was placed on the wrist of the robotic arm helped to install parts on the car body. Today, a robot; ABB IRB 6640 helps to perform 4000 welding operations in the car body just in 86 seconds time period. ABB IRB 7600 robot can place the car panel at the right location. X-Ar arm developed by Equipoise is a type of robotic arm to reduce the weight applied to the human arm. Robotic arm which work for painting entire parts of the car, it is an important application of robot in four wheeler industry. It takes less time to complete more work.

There is much kind of robots that people could wear to enhance their capabilities. Powered exoskeleton is most helpful wearable robot for physically disabled persons. Powered exoskeleton is also known as powered armor. His lab developing flexible robot that makes our body natural, pendulum like working while walking. Mind walker by European Commissions, Altacro for disabled peoples, ExoAtlet Med for disabled people with locomotion disorders and Future Robot 2030 by US army; these are upcoming awesome inventions in Wearable robots

ASIMO or Advanced Step in Innovative Mobility is worlds most advanced humanoid robot developed by Honda. In 1986 engineers in Honda start to develop walking robot. Most of their inventions are focused on developing legs for stimulating the walk for humans. And then start to develop arm, head and body to increase the functionality and balance. Here Hondas first robot was developed with 6’2’’ tall and 175 kg weight. Next version was improved with more functionality, stair climbing/descending, upgraded walking, and wireless programmed movement. The combination of these two versions of module gets a new version of ASIMO! This latest version of Asimo can walk, run even on ramps, can rotate smoothly, etc... Asimo also has the facility to diagnose the face from a group.


In future ASIMO may provide legs, arm body for all kind of people in need like person with disabilities. And also take certain task which make very harmful for human such as cleaning up toxic spills and fighting fires.
 First humanoid robot designed to live with humans and ability to read emotions (joy, surprise, anger, doubt and sadness), designed by Aldebaran robotics. He doesn’t have any extra ordinary power, it just interact with others and react with your emotion autonomously. It’s very friendly with us for all time. They can communicate with us through voice, touch and emotions. It was introduced in 5th June 2014 and then it has been interacting with customer in SoftBank Mobile store in Japan since 6th June. It will be available in market on 2015 February at a cost of $1931 at SoftBank Mobile store. Pepper robot can check its own internal body temperature and battery charge level. A 3D camera is used to capture its surroundings and ultrasonic sound system to identify their obstacles to walk without any problems. Pepper also has tactile sensor to feel and react. It uses an emotional sensing engine. To find gestures, expressions and voice stone an artificial intelligence system is used on it. He is very interest about talking and interacting with others like a human.
First humanoid robot designed to live with humans and ability to read emotions (joy, surprise, anger, doubt and sadness), designed by Aldebaran robotics. He doesn’t have any extra ordinary power, it just interact with others and react with your emotion autonomously. It’s very friendly with us for all time. They can communicate with us through voice, touch and emotions. It was introduced in 5th June 2014 and then it has been interacting with customer in SoftBank Mobile store in Japan since 6th June. It will be available in market on 2015 February at a cost of $1931 at SoftBank Mobile store. Pepper robot can check its own internal body temperature and battery charge level. A 3D camera is used to capture its surroundings and ultrasonic sound system to identify their obstacles to walk without any problems. Pepper also has tactile sensor to feel and react. It uses an emotional sensing engine. To find gestures, expressions and voice stone an artificial intelligence system is used on it. He is very interest about talking and interacting with others like a human.
Specifications
These are the simple and advanced type robots. These types of robots have capability to move around its surroundings. Mobile robots spread over industrial, military and security applications. Movement is done by using wheels or tread (or track) or air based, water based or by using arm and grippers.

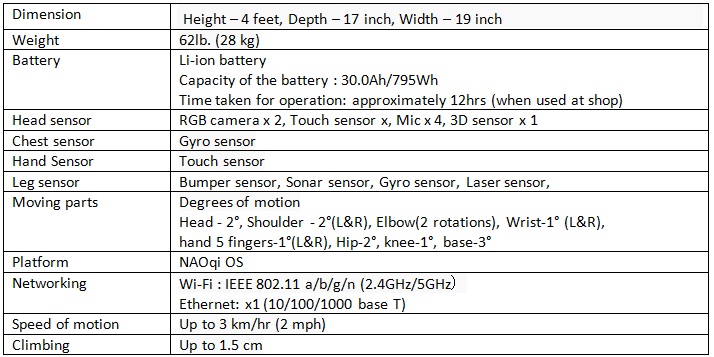
NAO
It’s another type of pepper robot and also from same family, developed by Aldeberan Robotics. It attended International Robotic Soccer competition held on 15th August 2007. NAO can move, recognize others, can hear and talk to others. 6 prototypes of RAO were designed in between 2005 to 2007. It has 25o of freedom and build with Onboard Intel Atom 1.6GHZ CPU. Ask him to do something he does it fast. It helps you to wake up in the morning, helps to teach multiplication table, monitor your home. Nao has anti-self-collision system. 4 Directional Microphones are attached to its head to recognize voice and according to that voice it moves and two cameras to observe its surround.
Specification

NAO support Wi-Fi and Ethernet for network communication with the controller and it has the capability to communicate in 19 languages. 1220 pixel camera helps to capture up to 30 images per second, which is located in the NAOs forehead. Infrared activated system helps to communicate with other NAOs and other infrared activated systems too.
AIBO is the short form of Artificial Intelligence robot, which is an entertainment robot designed by Sony. AIBO is a Japanize word, Partner or Companion is the meaning of this name. AIBO have been using in many advertisement companies and movies. Construction is very cheap, highly compact and very stable. AIBO has a central processing unit as its brain to give ability to move and to sense. Basic communication components are arranged in their forehead. A distance detector is placed in front of its body to avoid obstacles, and color video camera to vision even in dim light mode, and stereo for hearing instruction from the controller. AIBO has ability to change their eye color and shape. In Market, AIBO reached as an entertainment robot especially for children.

After a long time of research, RoboBee: world’s smallest robot was developed by a group of researchers from Harvard Universities. Robobee has size of a coin and its weight is about below 1gram weights. The material used to construct it is carbon fiber material. It includes super-fast electronic muscles to fly over the land. Robobee has the flexible tin wings that beat with a frequency of around 120 times per second. The one of the main advantage of this type of robot is that it can fly through tiny spaces in collapsed buildings. It needs a small off-board power source is connected to fly, now the developers said that in future only small amount power source needed to construct a wireless robobee.

Robobee’s wingspan is 1.2 inch (3cm), which is considered as the smallest wingspan ever made by human to achieve flight. This wing can flap 120 times per second and it is controlled by remote. The total weight of this robot is about 80 milligrams.
The Three Laws of Robotics or Shelnutt’s Law are set of rules devised by Isac Asimov
Sections





Copyright © 2024 Mepits - Designed By Digiora

