The main aim of this project is to detect any alive human being inside any debris with the help of a robot. Natural or man-made disaster creates immense destruction and in those destructions searching and rescuing human life is a cumbersome job. For rescue operators to remove all the debris and recovering humans will take time and in that course the loss rate will be high. In such scenarios robots can reach places were human can’t. Here in this project we are trying to develop a robot which will be moving under the debris and detecting any alive. If found will acknowledge the rescue team with the location team so that they can revive him before late.
Transmitter side
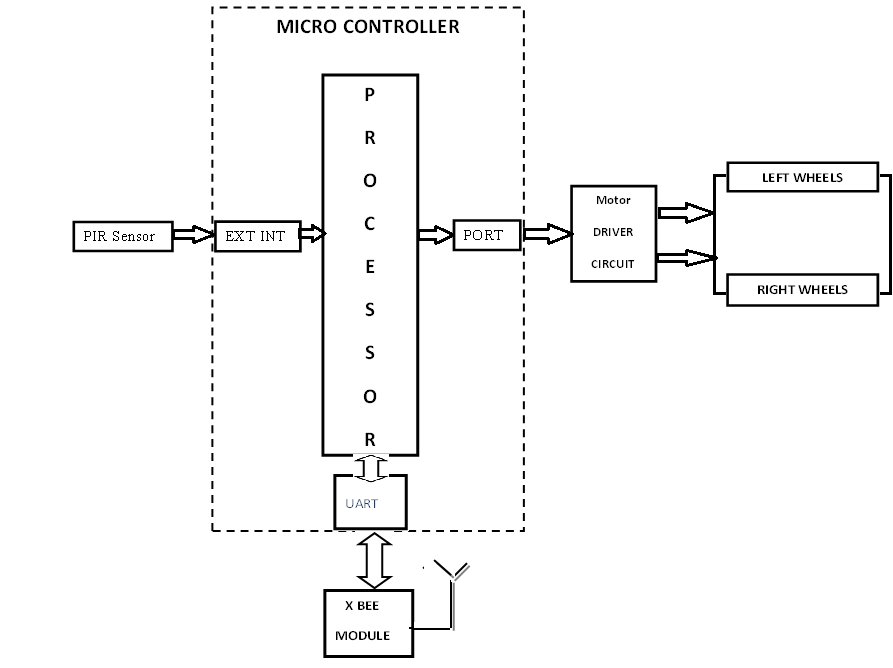
Receiver Side

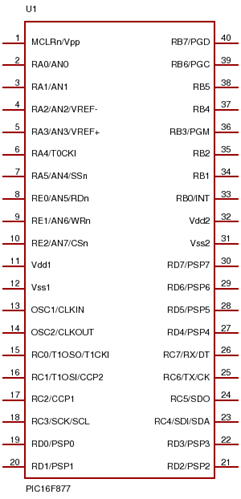
16F877A a 40 pin, 8 bit IC has been used as microcontroller. It belongs to the class of PIC microcontroller having many peripherals like UART, timers, ADC etc. It will be controlling the whole embedded system. Pin diagram of the PIC has been provided:
The robot is controlled using this PIC microcontroller. It has 2 12V DC motors connected to its front wheel to power its movement. The robot is designed to move in forward, backward, right and left direction. The instructions regarding the direction are communicated using zigbee module. Zigbee is a type of wireless communication under the standards IEEE802.15.4 and has a range extending from 500 m to 1.6 km. The pin out of zigbee is given below:

The direction to the robot is given depending upon the wireless camera mounted on the robot. Live videos of the surrounding will be telecasted to the receiver side. It has an inbuilt transmitter which will communicate to the PC in the receiver side through RF signals of either 2.4 GHz or 5.8 GHz. The camera in use is digital one as the interference or noise distribution will be minimal while transmitting. In the receiver side the PC will have a tuner card to receive these signals and the live videos will be displayed in the PC. Based on the videos person will take the decision.
In the front panel of the PC there will be buttons to select the direction the robot has to move. The buttons will be left, right, forward, and backward. Using zigbee it will communicate to the PIC microcontroller. The zigbee module is interfaced with PC using RS232. The buttons pressed in the PC will be transferred to the zigbee through RS232. The zigbee in the other end will receive the instruction. It is interfaced with the PIC through USART. Universal Asynchronous/Synchronous Receiver/Transmitter is a serial communication interface. It is configured as UART mode having full duplex and don’t require to send clock signals along with. The RX and TX pins of the PIC are connected to Data in and Data out of the zigbee module for receiving and transmitting data.
PIC will communicate this instruction to the DC motor through a motor driver IC. L293D is used here. This interface is required as microcontroller can’t drive the motors on its own because of the requirement of high current and voltage. Microcontroller works with low voltage and current. This L293D will provide the necessary current to drive the motors. It can support 2 DC motors simultaneously. It has 2 H-bridge configuration.
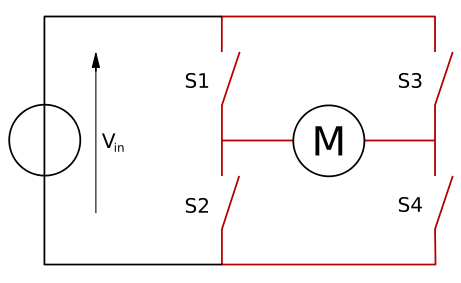
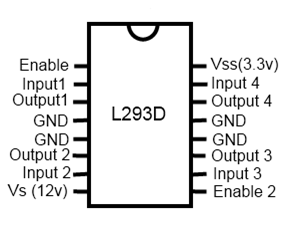
Since there are 2 motors, the input pins of the motor driver IC will be connected to digital input pins of the microcontroller. The enable pins will be kept high. Depending upon the instructions from the PC, microcontroller will set corresponding pins high i.e. closed position and the correspondingly motor will rotate and the robot will move.
|
Left Motor Direction |
Right Motor Direction |
Direction of Car |
|
Forward |
Forward |
Forward |
|
Forward |
Backward |
Right |
|
Backward |
Forward |
Left |
|
Backward |
Backward |
Backward |
To detect a human presence PIR sensor is the best. It will detect the human being from the IR rays emitted from the body. If a person is alive, then its body will emit IR rays which will be detected by the PIR sensor. The IR rays emitted from the human body will be in the range of 8 to 12 micrometer. The pin out of the PIR sensor is given below.
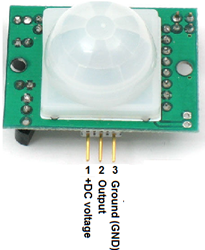
5 V is provided to the sensor. When a person is detected a high voltage signal is generated on its output. Its output is given to the PIC microcontroller interrupt pin as an interrupt because it has to be immediately notified to the rescue persons. When an alive person is detected PIR will produce a high in its output, which in turn is connected to interrupt pin will interrupt the working of microcontroller and will switch to interrupt sub routine. An alert signal will be displayed on the PC and person can get the location details from the camera.
The robot is released to debris to check any survivor. The wireless camera is switched on. The person in the controlling station can view the surrounding around the robot using the live video from the camera in his PC. From the live images the person can control the robot by pressing the keys in the front panel of the PC. This instruction will be communicated to the robot through zigbee connected to the PC through RS232.
The instruction will be received by the zigbee on the robot and through UART will be transmitted to the PIC. The microcontroller accordingly set the pins of the L293D high and low. L293D the motor driver act as an interface between the microcontroller and DC motor will drive the robot accordingly.
If the presence of an alive person detected using PIR an interrupt will be generated making the PIC to enter in to the interrupt sub routine and all the other actions will be halted. During this interrupt subroutine a warning message will be displayed at the controlling station and from the wireless camera it can get the location. Once the location is found they can excavate that location to rescue the person.
This project can be extend with heartbeat sensor, temperature sensor etc. to analyze the medical condition of the person.










Copyright © 2024 Mepits - Designed By Digiora






